














Makîneya Weldingê ya Fîber Lazer a Otomatîk a Robotîk a 6 Axis a Rastbûna Bilind

Taybetmendiyên Amûrê:
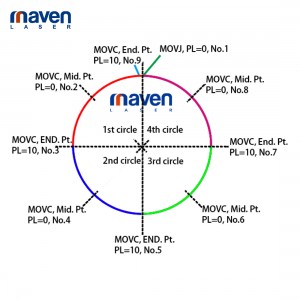
1. Bi karanîna tevgera robotîk, ku ji bo welding-a fezayê ya mezin-format minasib e, dikare girêdana şeş-eksen be.
2. Dikare li her cîhî weld bike, bi rastî weldkirina otomatîkî ya her rêgehek di cîhî de pêk bîne.
3. Rastbûna dubarekirina bilind, dikare weldingê gelek caran bêyî xeletî dubare bike, kalîteya weldingê stabîltir e.
4. Ew dikare şûna xebitandina destî bigire, û dikare zeviyên tevlihev û xeternak bi lazerê biqelîne.
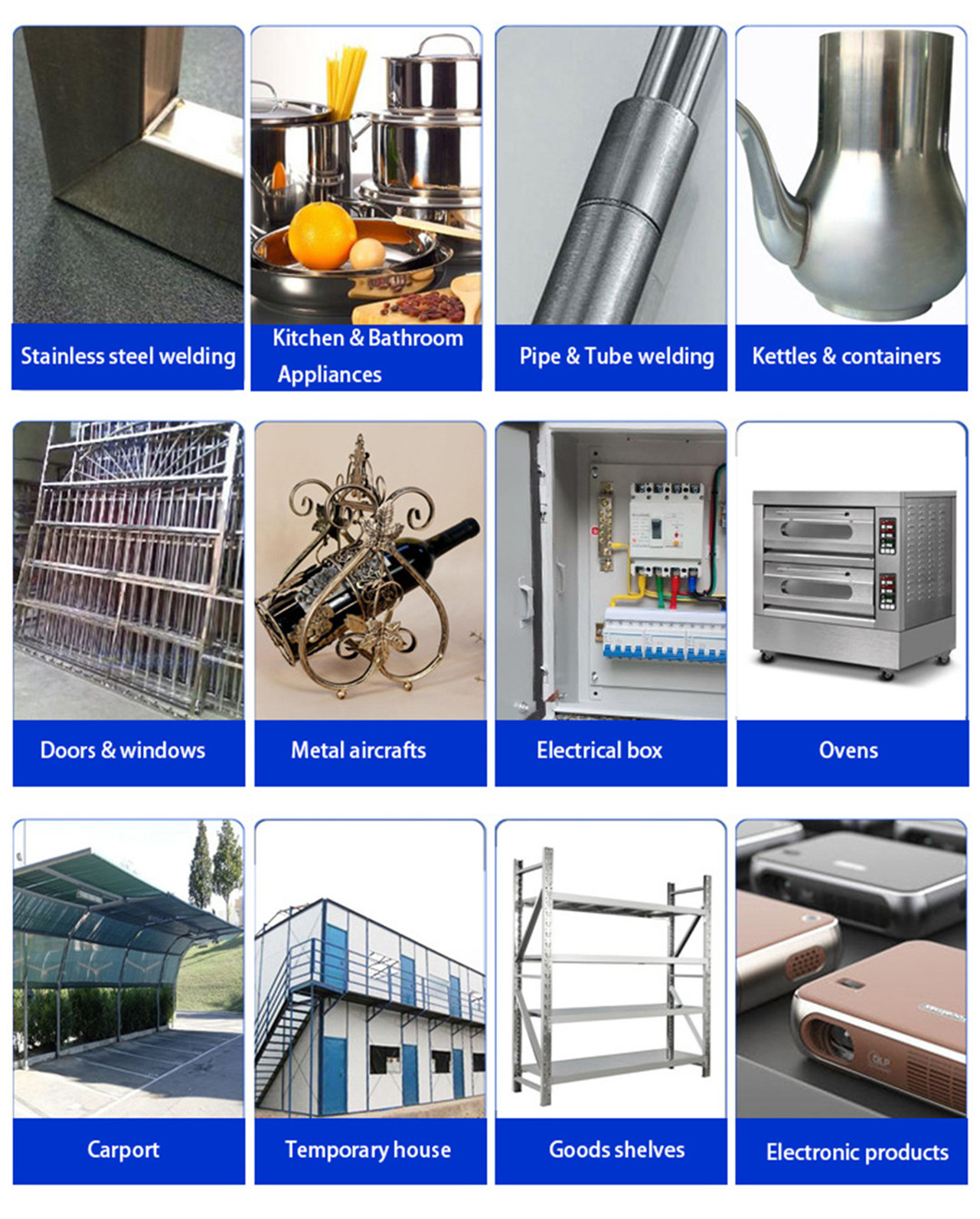
Qadên serîlêdanê:
Laşê otomobîlê, plakaya pola ya otomobîlê, plakaya keleçê, zeviyên weldingê yên dijwar û tevlihev, pêkhateyên mîkroelektronîkî, parçeyên rastîn, pêkhateyên dîjîtal ên pola bilind, girêdanên fîbera optîk, amûrên bijîşkî, weldinga qalibên mezin, qalibkirina derzîkirinê û weldingên din.
MAKÎNEYA QELÎNDKIRINÊ YA LAZER A ROBOTÊ
ÇARESERIYA QELÎNDKIRINA PROFESYONEL
Xwarina Têl û Qeydankirin li ser Pedala Kontrolê ya Baldar
Rastbûna Pozîsyona Robotê ya 0.08mm
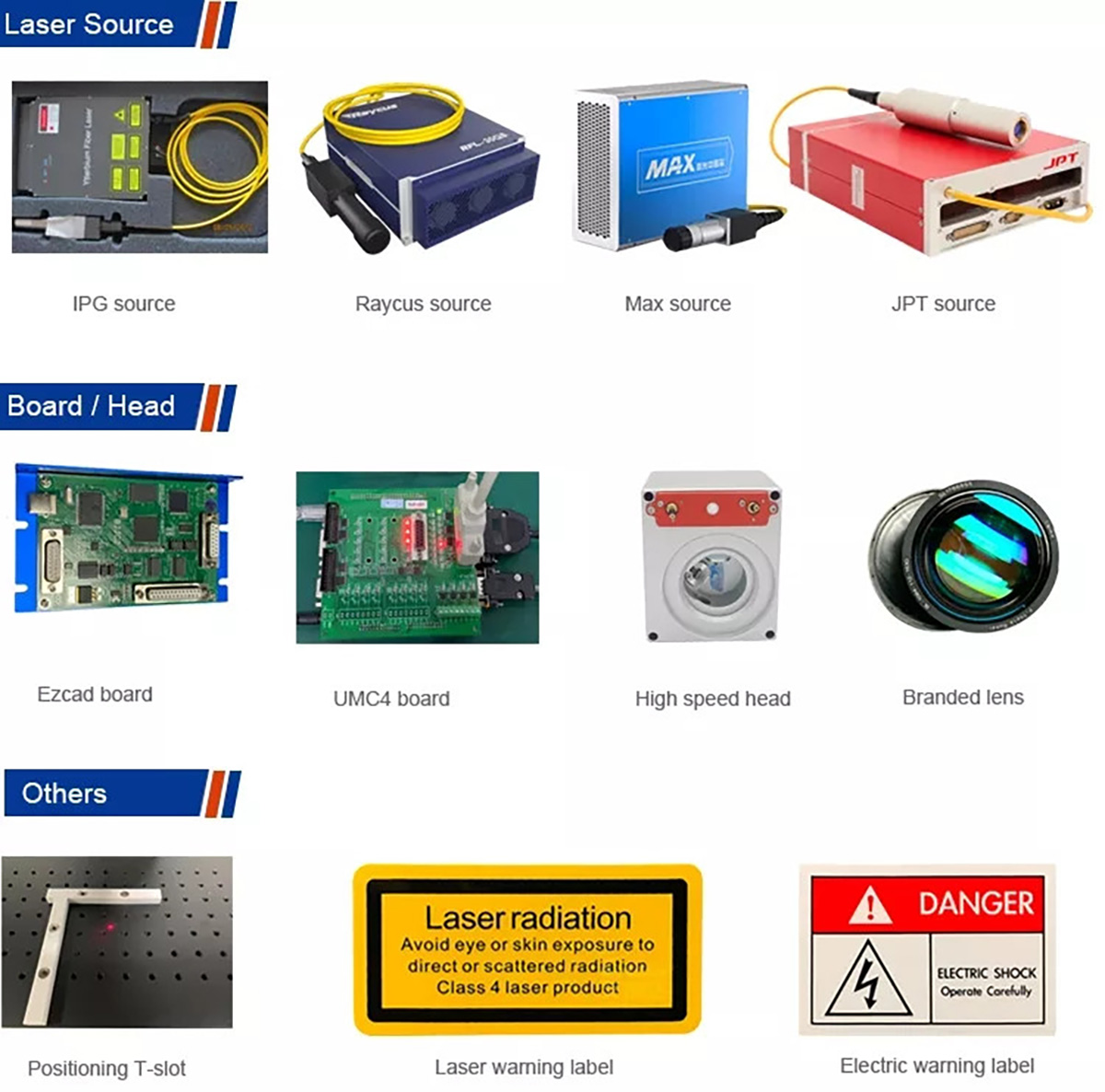
Raycus Max JPT IPG Laser Source Bijarî
Xwesazkirina Tevahiya Sîstemê
| Navê Berhemê | Makîneya Welding Laser a Otomatîk a RobotêMLA-W-A01 |
| Dirêjahiya pêlê | 1070+/-10 nm |
| Hêza Lazerê | 1000W 1500W 2000W 3000W |
| Rêkxistina Hêzê | 10-100% |
| Dirêjahiya Fîberê | Standard 10m an jî diyar bike |
| Rêbazên Xebatê | CW/Pulse |
| Rêzeya Lezê | 0-120 mm |
| Stûriya Qalibê | 0.5-6 mm |
| Pêdiviya Valahiya Weldingê | < 1 mm |
| Frekansa Modulasyonê | 20KHZ |
| Dema Vekirin/Girtinê | 20 Em |
| Germahiya Xebatê | 15-35 ℃ |
| Navê min | 220V/50HZ/30A |
| Rêbazên Sarkirinê | Avê Sarkirî ya Hundir |
| Mezinahiya Makîneyê | 990*540*1030 mm |





KARÊ HÊSAN
Kontrolkerek karanîna dostane ji bo hevkariya hêsan bi rêwerzên karê welding lazerê fîberê re
Entegrasyona Kontrolê
Entegrasyona kabîneya kontrolê ji bo kontrolkirina fonksiyona xwarina têl e. Û hêza lazerê dikare hêdî hêdî bilind bibe û dakeve da ku pêşî li şewitandina zêde bigire. Bilindbûn û daketina hêdî bi taybetî ji bo kaynakirina plakaya zirav sûdmend e. Dema ku manipulator diqedîne, bi gelemperî kaynakirin bi plakayê re hêsantir e.
ENTERGRATÛSYONA LASE
Ji bilî verastkirina parametreyên weldingê di sîstema lazerê de. Her wiha fonksiyonên ronahiya nîşana rewşa her sîstemê, guheztina ava elektrîkê, û bîranîna otomatîkî ji bo parastina lensê jî hene.
Entegrasyona Serî
Serê weldingê yê entegre, CCD li ser serî, hêza verastkirî, fokuskirina otomatîk, operasyona hêsan.
KARÊ HÊSAN
Bişkokên pendanta hînkirinê hêsan û fêmbar in, û bernamekirina hînkirinê dikare zû were fêr kirin û bikar anîn. Ger operasyon xelet be, makîne bixweber radiweste da ku ji xetera zirara alavan dûr bikeve.
BI BAŞÎ KAR BIKE
Piştî bernamekirinê, ew dikare her dem were bikar anîn. MavenLaser Robot Arm bi rastbûn û leza bilind 24 demjimêrên xebata bênavber piştgirî dike. Bi tevahî otomatîk dixebite, robotek dikare rojê karê ji 2-3 kesan zêdetir temam bike.
MESREFA KÊM
Veberhênana yek-carî, feydeyên demdirêj. Jiyana karûbarê robotê MavenLaser 80,000 demjimêran e, ku ev yek wekhevî zêdetirî 9 salan xebata bênavber a 24 demjimêran e. Ew lêçûnên kedê û lêçûnên rêveberiya personelê pir teserûf dike, û pirsgirêkên wekî zehmetiya peydakirina mirovan çareser dike.
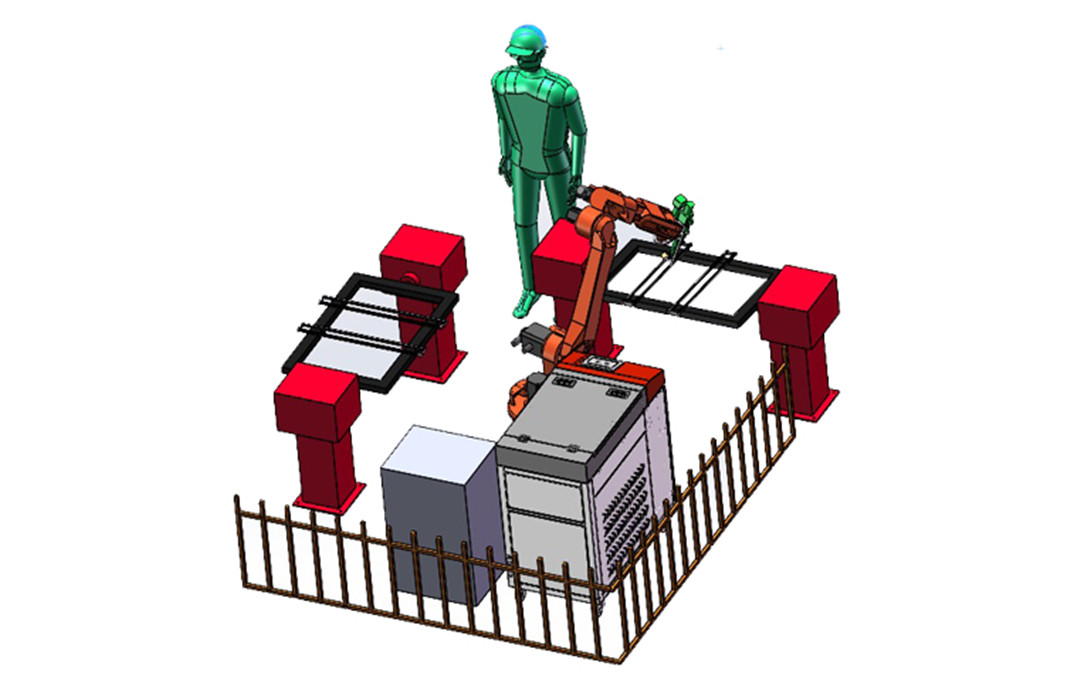
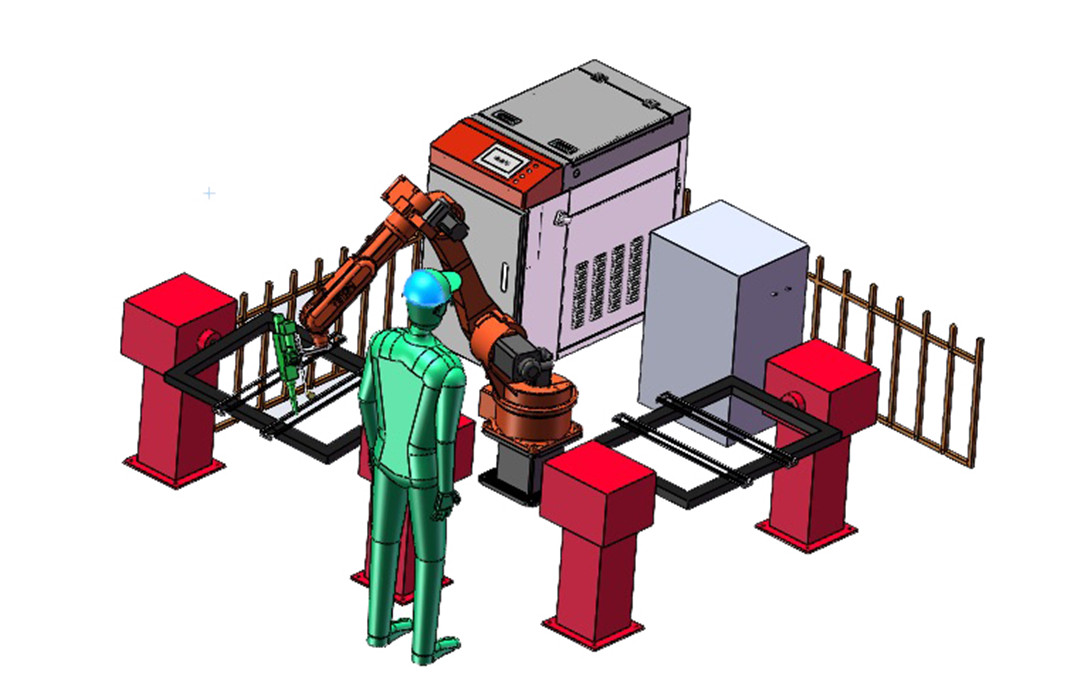
EWLE Û PÊBAWEŞ
Bazûyê robotê MavenLaser bi tedbîrên parastina ewlehiya fotoelektrîkî ve hatiye sazkirin. Dema ku tiştên biyanî dikevin qada xebatê, ew dikare bixweber alarmê bide û kar rawestîne da ku rê li ber qezayên li ser karker bigire.
ENERJÎ Û CIHÊ EWLE
Sêwirana xeta alavên otomasyonê yên MavenLaser hêsan û rêkûpêk e, şopa wê ya piçûk, bê deng, baskê robotê sivik û bihêz, xerckirina enerjiyê kêm e, saxkirina enerjiyê û parastina jîngehê ye.
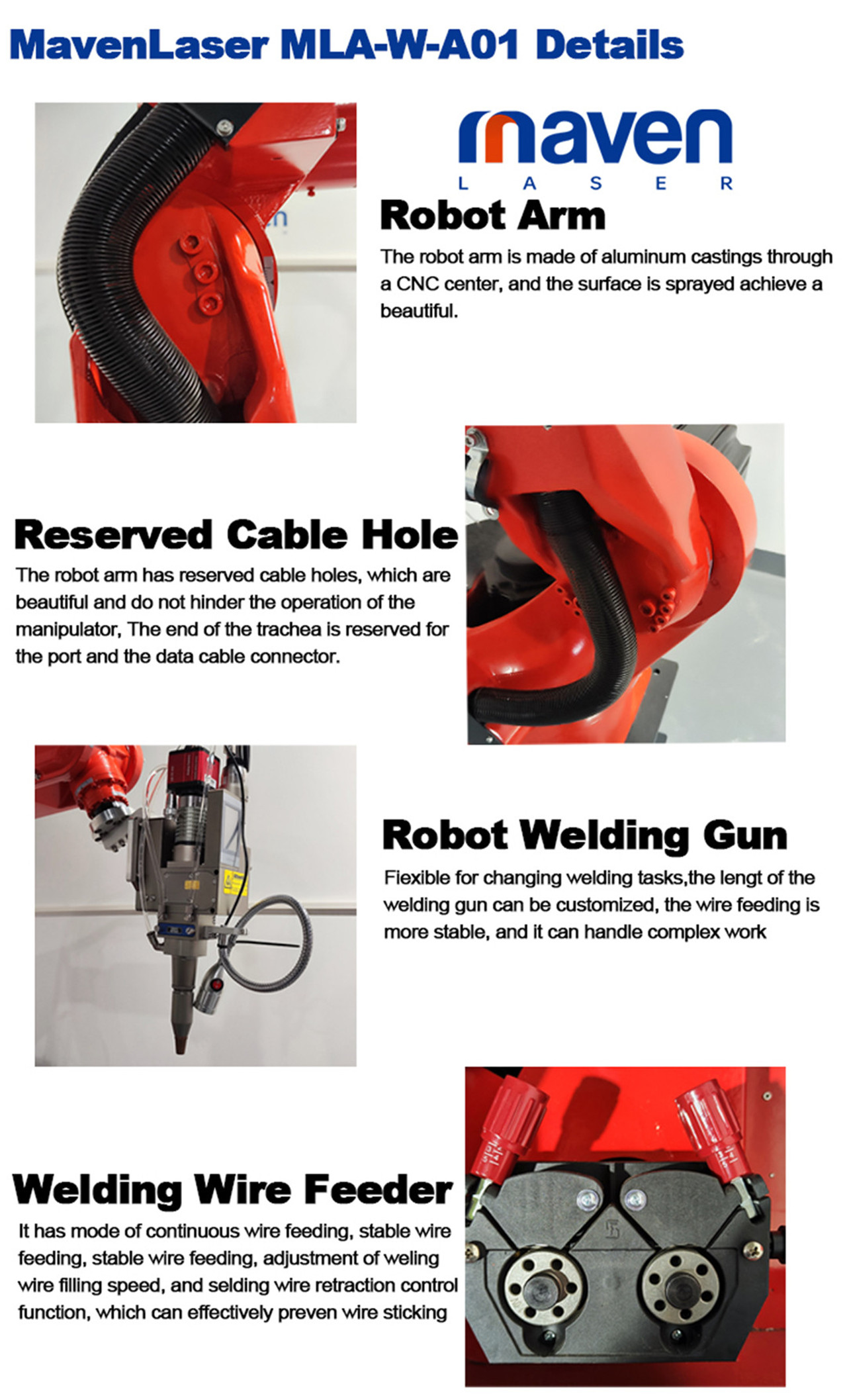
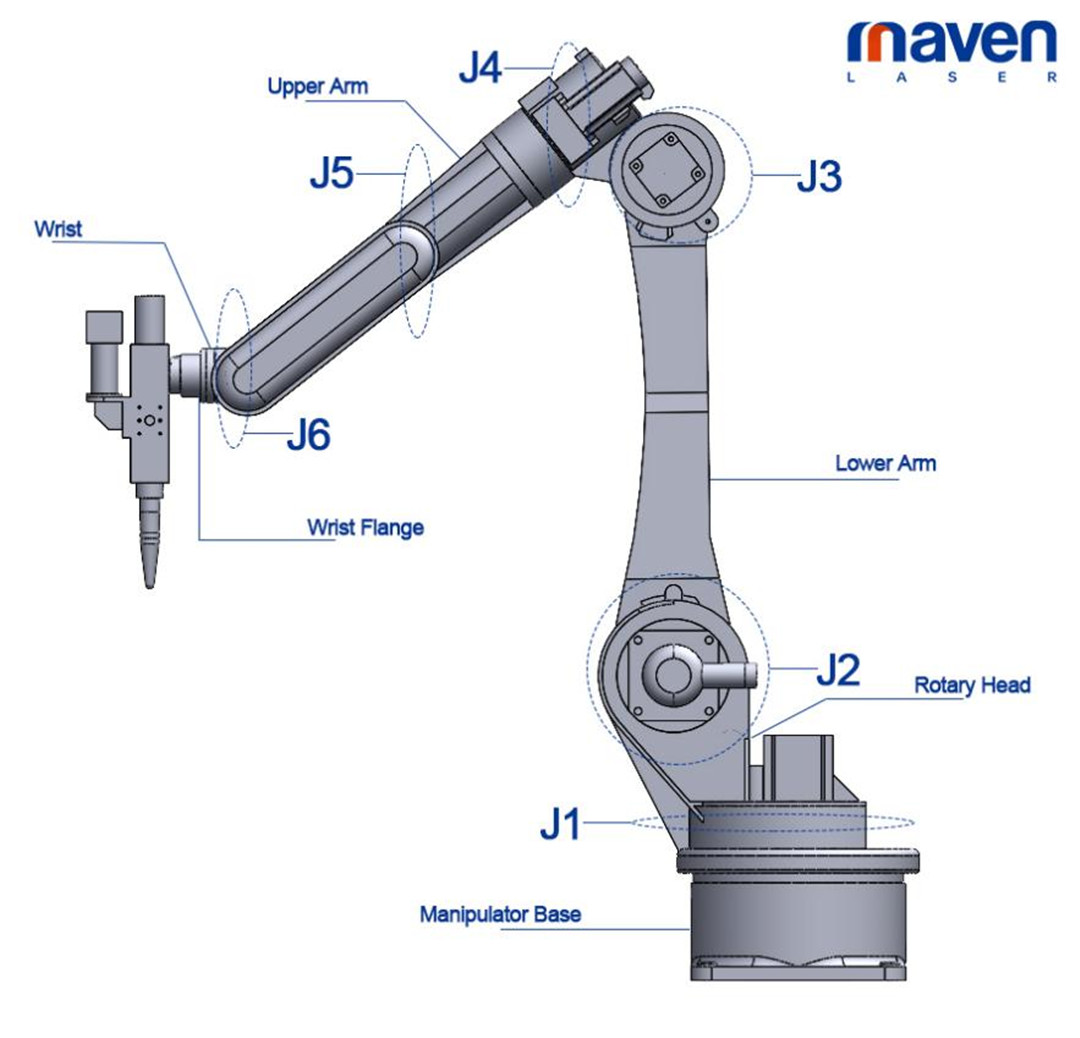
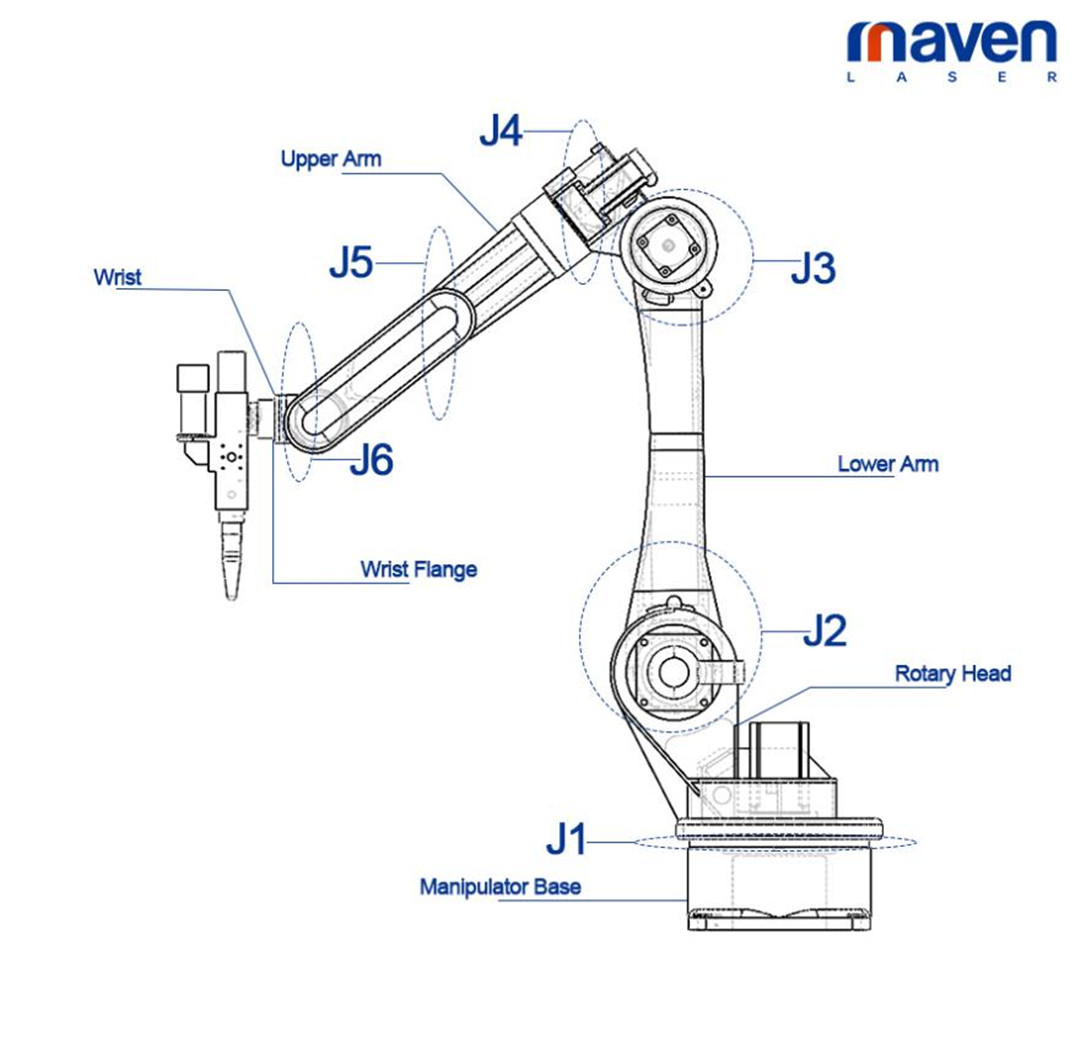
Bazûyê Robotê
Milê robotê ji qalibên alumînyûmê bi rêya navendeke CNC-ê tê çêkirin, û rûber bi spreyê tê reşandin da ku dîmenek xweşik bi dest bixe.
Kunê Kabloyê yê Parastî
Milê robotê qulên kabloyê yên veqetandî hene, ku xweşik in û bi tu awayî astengiyê li xebitandina manipulatorê nakin, dawiya trakeayê ji bo port û girêdana kabloya daneyê hatiye veqetandin.
Çekê Qeymaqê ya Robotê
Ji bo guhertina karên weldingê nerm e, dirêjahiya çeka weldingê dikare were xweş kirin, xwarina têl aramtir e, û ew dikare karên tevlihev birêve bibe.
Xwarinkera Têla Weldingê
Moda xwarina berdewam a têl, xwarina têl a sabît, xwarina têl a sabît, verastkirina leza dagirtina têl a tijîkirinê, û fonksiyona kontrola vekişîna têl a helandî heye, ku dikare bi bandor pêşî li zeliqîna têl bigire.
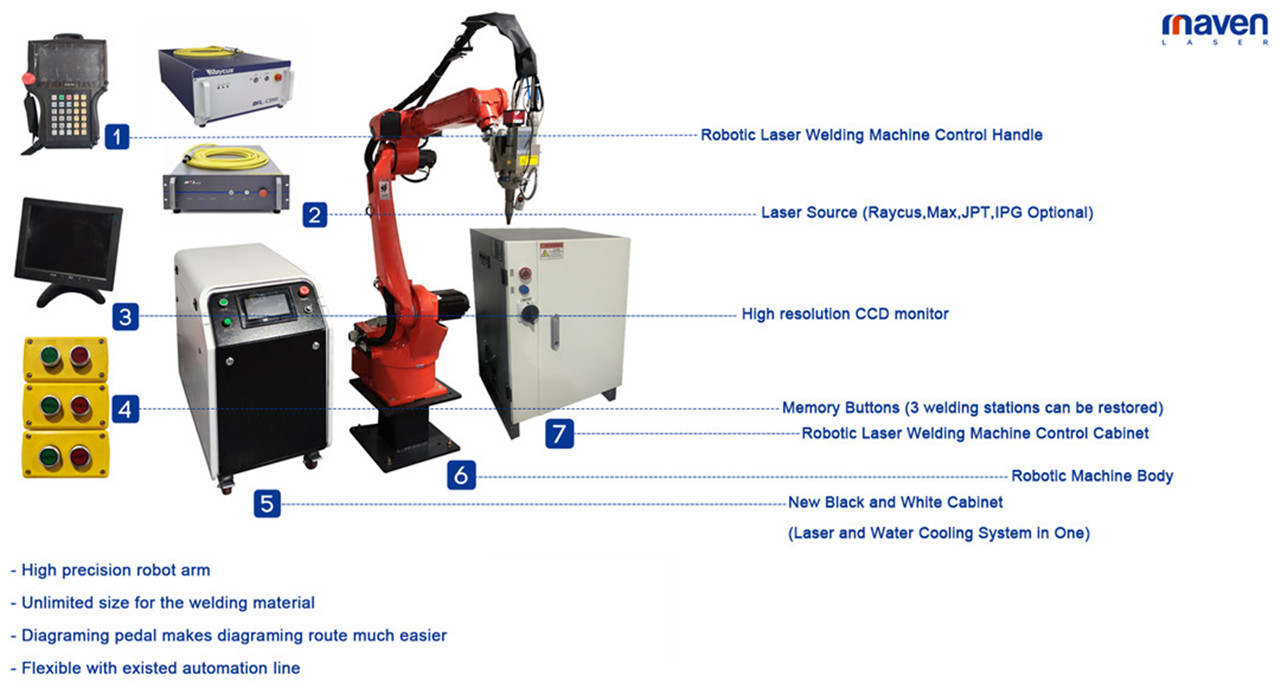
● Çavkaniya Laser (Raycus, Max, JPT, IPG Vebijarkî)
● Çavdêriya CCD ya çareseriya bilind
● Bişkokên Bîrê (3 îstasyonên weldingê dikarin werin sererastkirin)
● Kabîneya Reş û Spî ya Nû (Sîstema Sarbûna Lazer û Avê di Yekê de)
● Laşê Makîneya Robotîk
● Kabîneya Kontrolkirina Makîneya Welding Laser a Robotîk
● Armê robotê yê rastbûna bilind
● Mezinahiya bêsînor ji bo materyalê weldingê
● Pedala dîyagramê rêya dîyagramê pir hêsantir dike
● Bi xeta otomasyonê ya heyî re nerm e
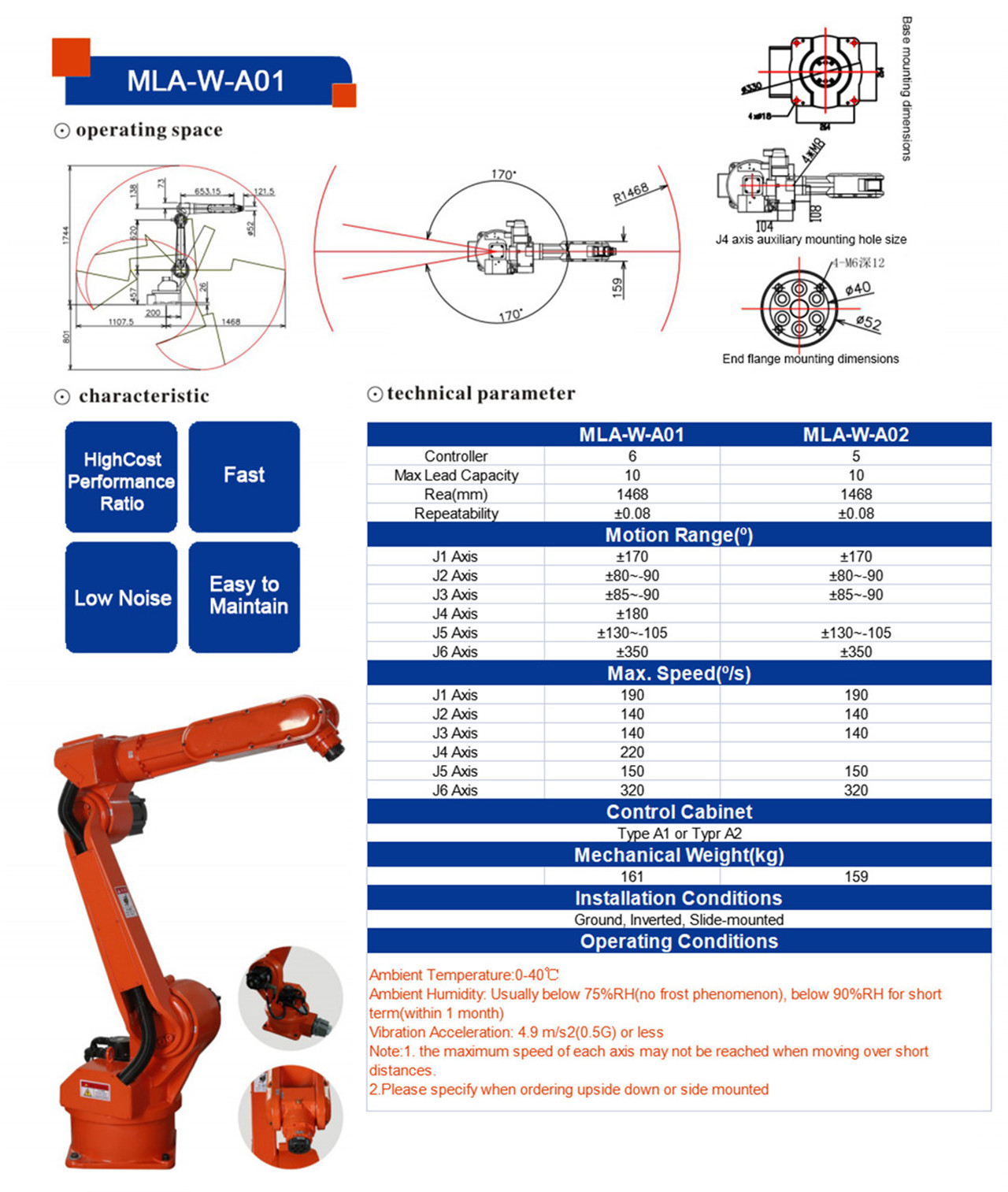
| MLA-W-A01 | MLA-WA02 | |
| Kontrolker | 6 | 5 |
| Kapasîteya Serê Herî Zêde | 10 | 10 |
| Rea (mm) | 1468 | 1468 |
| Dubarekirin | ±0.08 | ±0.08 |
| Rêzeya Tevgerê (°) | ||
| Eksena J1 | ±170 | ±170 |
| Eksena J2 | ±80~-90 | ±80~-90 |
| Eksena J3 | ±85~-90 | ±85~-90 |
| Eksena J4 | ±180 |
|
| Eksena J5 | ±130~-105 | ±130~-105 |
| Eksena J6 | ±350 | ±350 |
| Leza herî zêde (°/s) | ||
| Eksena J1 | 190 | 190 |
| Eksena J2 | 140 | 140 |
| Eksena J3 | 140 | 140 |
| Eksena J4 | 220 |
|
| Eksena J5 | 150 | 150 |
| Eksena J6 | 320 | 320 |
| Kabîneya Kontrolê | ||
| Tîpa A1 an Tîpa A2 | ||
| Giraniya Mekanîkî (kg) | ||
|
| 161 | 159 |
| Mercên Sazkirinê | ||
| Erd, Berevajîkirî, Li ser şemitokê hatiye siwarkirin | ||
| Mercên Xebatê | ||
Germahiya Hawirdorê: 0-40℃
Şilbûna Hawirdorê: Bi gelemperî li jêr 75%RH (bê diyardeya qeşayê), li jêr 90%RH ji bo demek kurt (di nav 1 mehê de)
Lezkirina Lerizînê::4.9 m/s2(0.5G) an kêmtir
Têbînî: 1. Dema ku li ser mesafeyên kurt tê ajotin, dibe ku leza herî zêde ya her eksena neyê gihîştin.
٢. Ji kerema xwe dema ku hûn serûbin an jî li kêlekê siwar dikin, diyar bikin
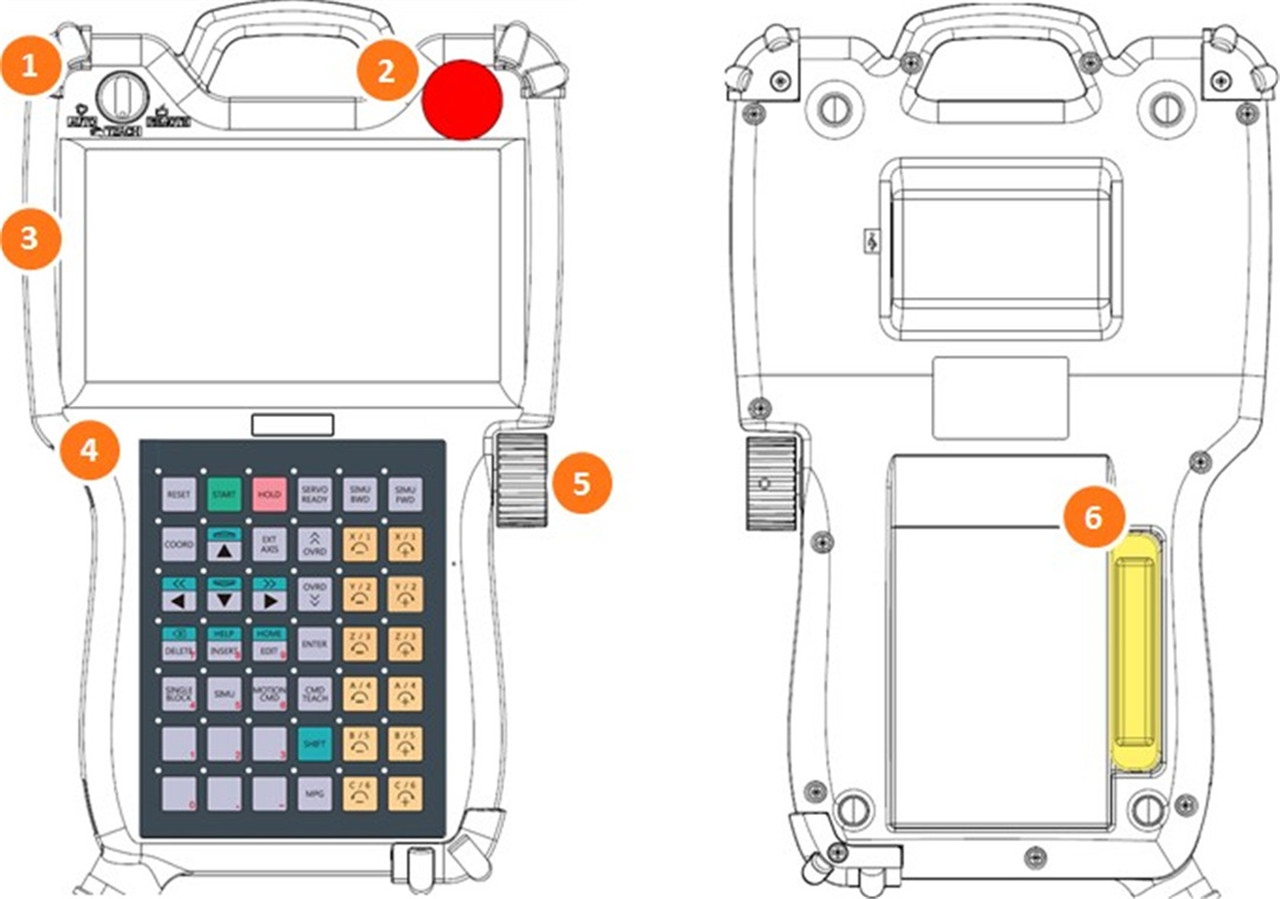
1. Guhêrbarê Modê
2. Rawestandina Awarte
3. Ekrana Nîşandanê
4. Mifteyên Fizîkî
5. MPG (Jeneratora Pulsê ya Destî)
6. Çalakkirina Amûrê

Kategoriyên berheman
-

Makîneya Welding a Boom Mold a Entegrekirî bi Optio ...
-

Rastbûna Bilind a Otomatîk ji bo Zêrîn û Har ...
-

Derzîkirin/Die-c a Pirfonksiyonel û Nerm...
-

YAG Jewelry Zêr û Zîv Çakkirina Lazerê ya Qeydakirinê...
-

Maven Laser Super zêrên zêr ên rastbûna bilind c ...
-

Alavên Lehimkirina Zêrên Îtalyayê 200w ji bo Stai ...











